Local Navigation
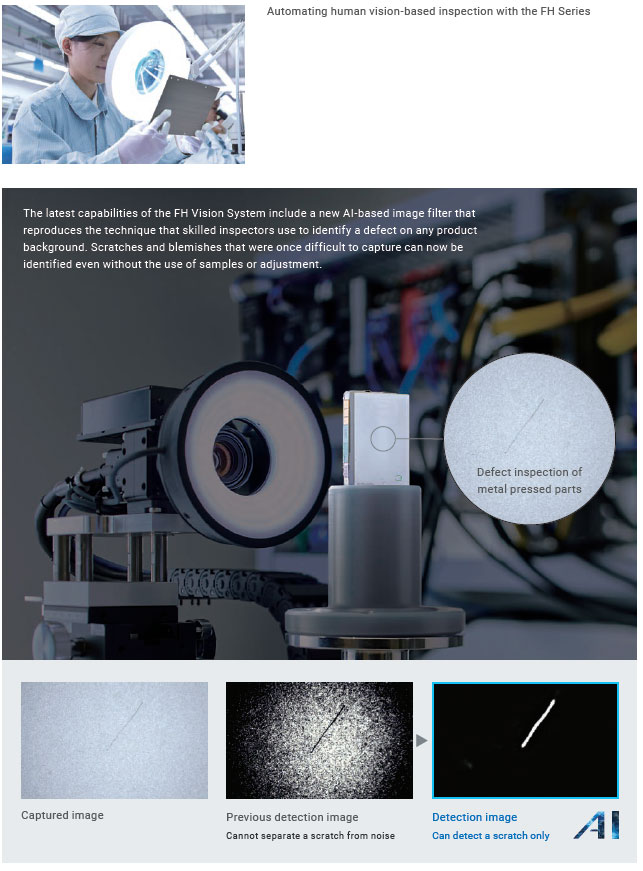
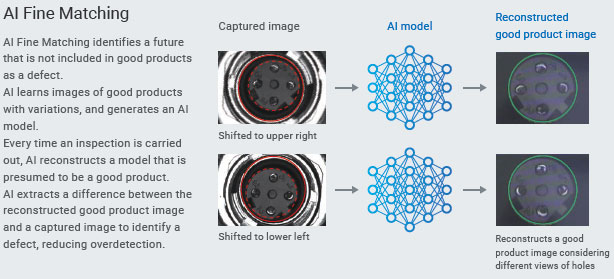
사람의 감성에 의존했던 “관능 검사”를 자동화. 흠집의 육안 검사 방법을 AI 기술로 재현했습니다.
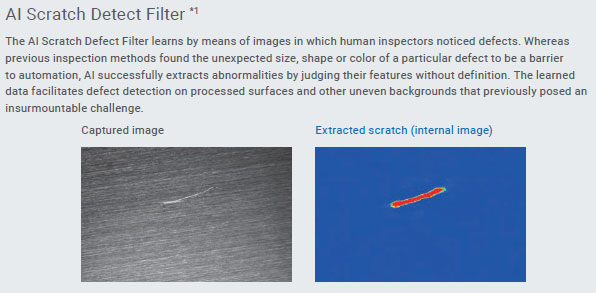
*1. AI 흠집 추출 필터를 사용하려면 흠집 추출 AI 소프트웨어 인스톨러(FH-UMAI1)가 필요합니다.
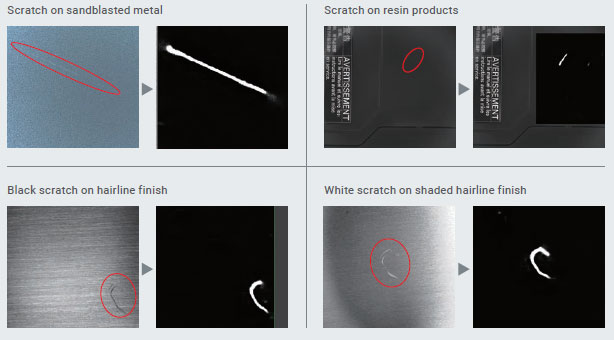
흠집 정의가 필요했던 다음과 같은 다양한 재질ㆍ색ㆍ사이즈의 흠집을 조정 없이 안정적으로 추출할 수 있습니다.
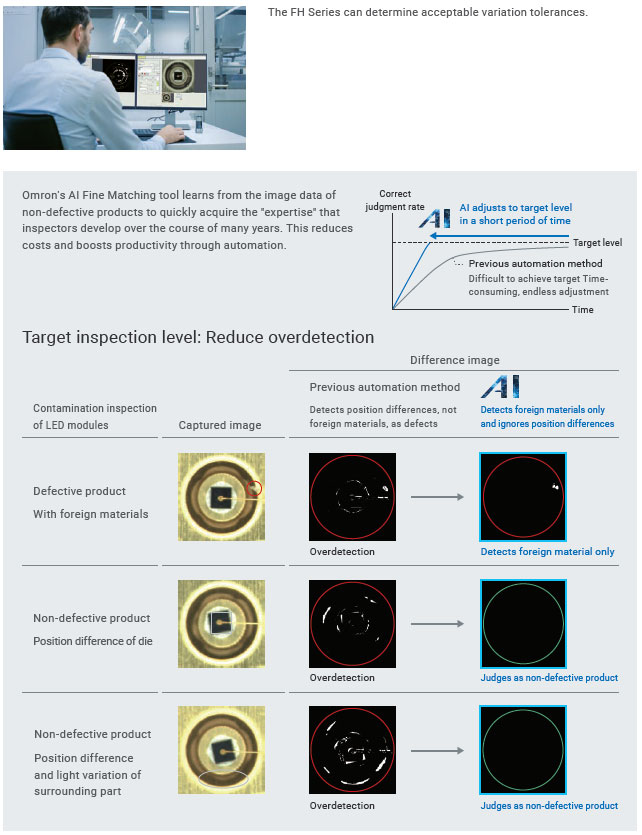
숙련된 검사원의 감성과 경험을 통한 “관능 검사”를 자동화. 검사 방법을 AI 기술로 재현했습니다.
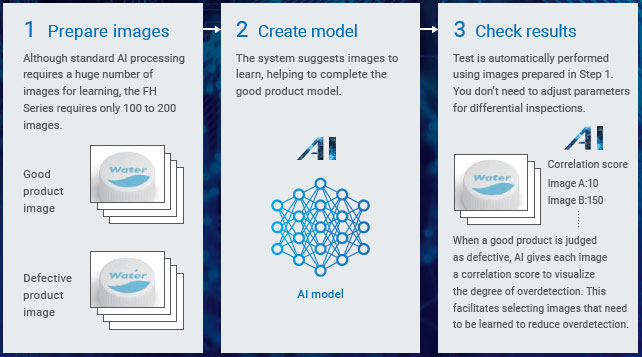
AI의 사용 노하우를 담은 설정 화면을 사용해, 3스텝 조작으로 설정을 완료할 수 있습니다. 최소 화상 매수로 설정할 수 있도록 AI가 양품 학습 프로세스를 제안해 줍니다.
*1. 「특허 출원 중/특허 취득 완료」 표기는 일본에서 특허 출원 중 또는 특허 취득 완료임을 나타냅니다. (2020년 5월 현재)
AI 도입을 위한 고사양 하드웨어는 물론, 각각의 현장 환경에 맞춘 시스템으로 마감 처리하기 위한 AI 엔지니어도 필요 없습니다. 생산 현장에서의 사용 실적을 다수 보유한 범용 화상 처리 시스템으로 AI를 간단하게 도입할 수 있습니다.
고사양 환경을 필요로 하는 AI를 경량화하여, 이미 검사 시장에서의 도입 실적이 다수 있는 FH 시리즈 하드웨어에 처리 항목으로 탑재했습니다
정보 갱신 : 2021/04/01