제어는 PID 각각의 상수, 사용 환경 등 복수의 밸런스로 구성되어 있습니다.
따라서 원하는 동작에 따른 정수를 구체적인 숫자로 구할 수 없습니다.
아래의 예를 참고하여 수동 상수 조정, 동작 확인을 반복하여 적절하다고 생각되는 상수로 조정해 주십시오.
(주의점)
사용 환경에 따라서는 PID 상수 재조정만으로는 개선할 수 없는 경우가 있습니다.
(표1) P(비례대) 조정 시 응답
|
조정
|
그래프
|
동작
|
|
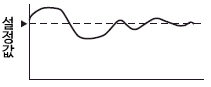
크게 설정
|
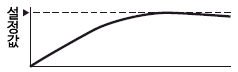 |
천천히 증가하여 정정 시간이 오래 걸리지만 오버슈트를 하지 않게 됩니다.
|
|
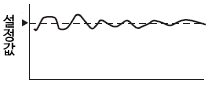
작게 설정
|
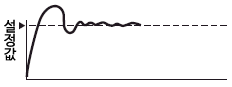 |
오버슈트 및 헌팅이 발생하지만 빨리 설정 값에 도달하여 안정됩니다.
|
(표2) I(적분시간) 조정 시 응답
|
조정
|
그래프
|
동작
|
|
크게 설정
|
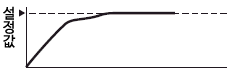 |
설정값 도달까지의 시간이 길어집니다.
정정 시간이 걸리지만 헌팅, 오버슈트, 언더슈트가 작아집니다.
|
|
작게 설정
|
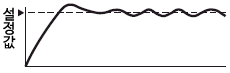 |
오버슈트 및 언더슈트가 일어나고 헌팅이 생기지만, 빨리 설정 값에 도달합니다.
|
(표3) D(미분시간) 조정 시 응답
|
조정
|
그래프
|
동작
|
|
크게 설정
|
 |
오버슈트, 언더슈트가 정정 시간과 함께 작아지지만, 자기 자신의 변화에 세세한 헌팅을 만듭니다.
|
|
작게 설정
|
 |
오버슈트 및 언더슈트가 커져 설정값으로 돌아올 때까지 시간이 걸립니다.
|
■ 부탁
설정 파라미터의 상세, 조작 순서등에 대해서는, 상품 상세 페이지의 카탈로그 또는 유저 메뉴얼을 이용해 주세요.



