|
모델기 소개
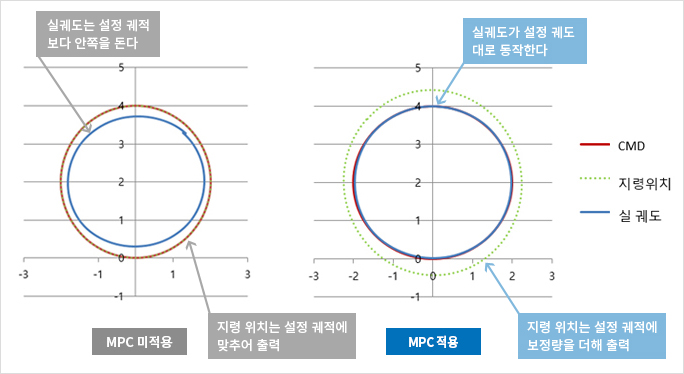
고속의 궤적 제어를 실행하기 위해서는 지령 값을 장비가 따라가야만 하지만, 실제로는 장비의 움직임이
지령 값을 못 쫓아가는 일이 발생합니다.
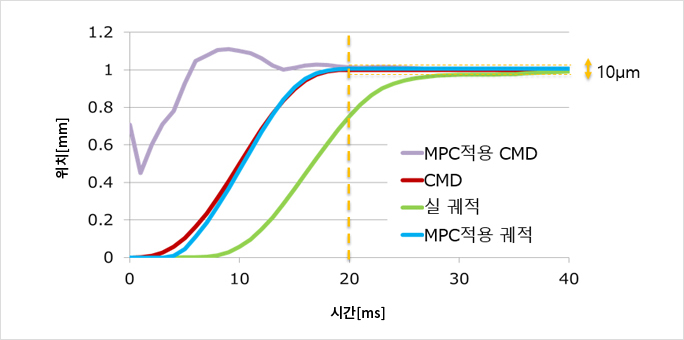
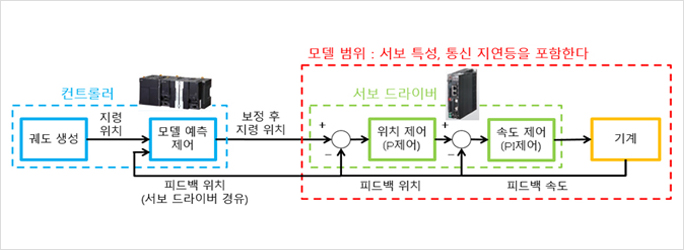
하지만, MPC는 서보 드라이버 및 기계 전체를 제어 대상으로
간주하고 매 주기마다 보정을 실행하여, 변화량을 예측하고 실궤도와 지령 값이 일치할 수 있도록 지령 값을
변경해줍니다.
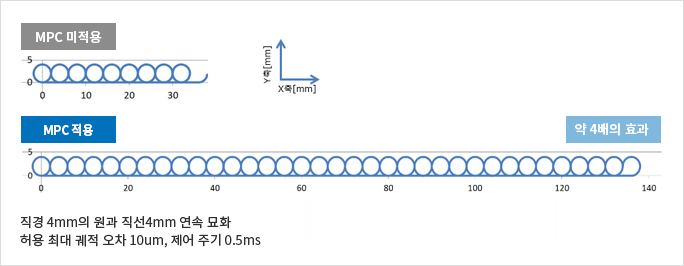
이를 통해, 같은 궤적의 정도를 확보하는 조건에서는 종래의 동작보다 고속화할 수 있기
때문에 사이클 타임을 큰 폭으로 단축할 수 있으며,
추종 지연이 커지기 쉬운 고속 위치 결정 제어에서는
정정 시간을 큰 폭으로 단축할 수 있습니다.
|