|
|
|
|
|
모델기 소개
기존에는 로봇과 PLC에 대한 제어를 각각의 프로그램에서 다루어야 했지만, NJ-R 로봇 통합 컨트롤러에서는 로봇과 PLC를 1개의 소프트웨어, 1개의 언어, 1개의 컨트롤러로 실현을 하며, 개발 프로세스 생산성 향상을 실현했습니다. 또한 로봇과 PLC의 통합 시뮬레이션을 통해 사전 검증 및 유지보수에 대한 공수도 단축할 수 있습니다.
|
|
|
|
|
One Controller
|
|
|
|
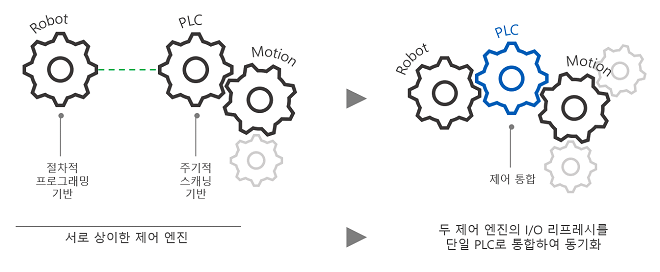
▶ 서로 상이한 제어 엔진의 제어 통합
스캔 주기에 따라 작동하는 PLC와 절차적 프로그래밍 기반의 Robot 제어 엔진을 통합하여 프로그램
태스크와 I/O 리프레시를 동기화합니다. |
|
|
|
|
▶ 간편한 프로그래밍
1소프트웨어 · 1언어 · 1컨트롤러로 PLC 시퀀스와 로봇을 프로그래밍할 수 있고, 동기적으로 실행됩니다. |
|
|
|
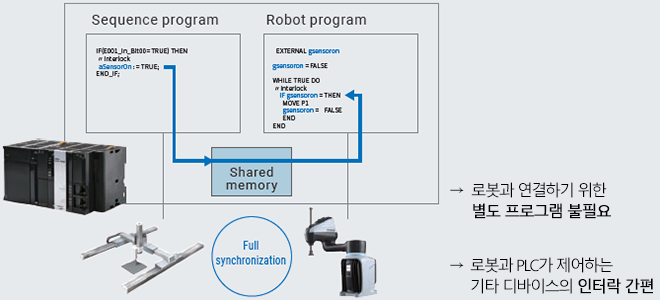
▶ 로봇과 PLC의 변수 공유
하나의 컨트롤러에서 제어하므로 로봇과 PLC의 변수를 공유할 수 있습니다. 컨트롤러 내의 공유 메모리를 통해 변수를 공유하므로 기존 공정에서의 변수용 별도 통신 구축 과정이 불필요합니다.프로그래밍 및 디버깅에 대한 공수가 대폭 단축되며, 통신 케이블이 불필요해져, 배선도 단축됩니다. |
|
|
|
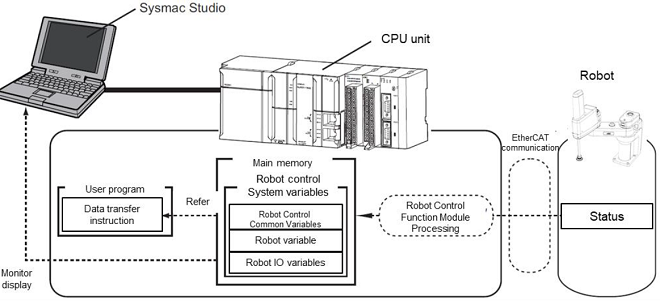
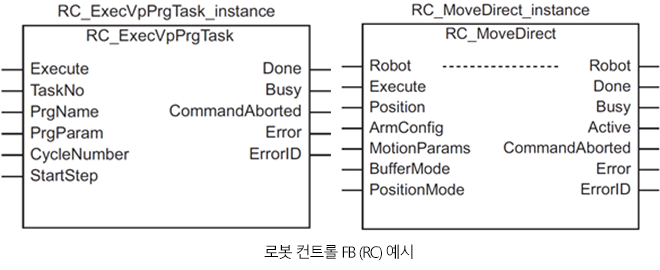
▶ PLC 언어로 로봇 제어
IEC 61131-3 규격에 따르는 PLC언어로 로봇 프로그래밍이 가능합니다. Function Block 과 ST언어를 이용하여, 마치 PLC로 모션을 제어하듯 PLC 엔지니어가 로봇을 작동할 수 있도록 지원합니다. |
|
|
|
|
|
|
|
3D Simulation |
|
|
|
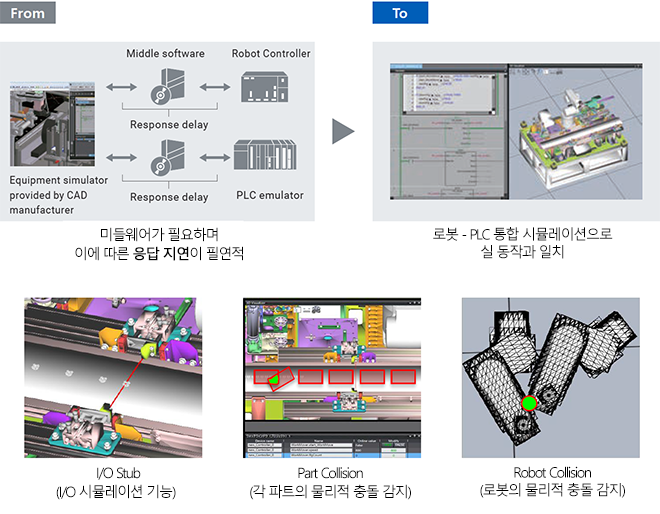
▶ 로봇 - PLC 시뮬레이션의 통합 실현
PLC로 제어하는 디바이스의 제어 주기와, 로봇 에뮬레이터로 제어하는 디바이스의 제어 주기를 동기화하여 실제 장비 동작과 완전히 일치하는 가상 검증 (Virtual Verification)이 가능합니다. 또한 로봇의 움직임 뿐만 아니라, 모션의 움직임을 연동한 시뮬레이션이 가능합니다. 실제 장비 운전 전, 장비 전반의 시뮬레이션을 단 하나의 소프트웨어로 할 수 있어, 설계 및 사전 검증/시공의 공수가 대폭 감소합니다. |
|
|
|
|
▶ Off-line 시뮬레이션을 이용한 유지보수 혁신
하나의 소프트웨어(Sysmac Studio)를 이용해 장비 시뮬레이션과 로봇 티칭을 오프라인에서도 할 수 있습니다. |
|
|
|
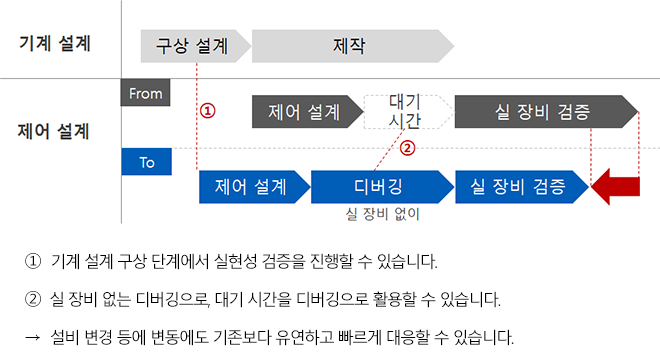
▶ 설계 단계의 공수 감소
3D 시뮬레이션을 활용하여, 설계 단계의 공수를 줄일 수 있습니다. |
|
|
|
|
|