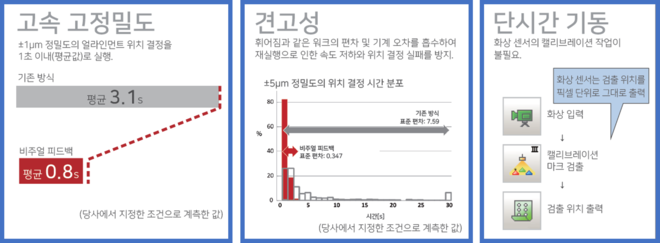
기술의 발전으로, 부품이 점점 작아지고, 유연성을 가지면서 Alignment시 어려움이 발생합니다. 비주얼 피드백은 모터의 현재 위치에 비전의 좌표 데이터를 활용하여 화상 촬영과 동시에 모터의 이동량을 피드백하기 때문에 반복작업 없이 보정을 수행합니다. 검사 품질을 유지하면서, 택 타임 단축의 양립을 실현할 수 있습니다.
기존 문제점
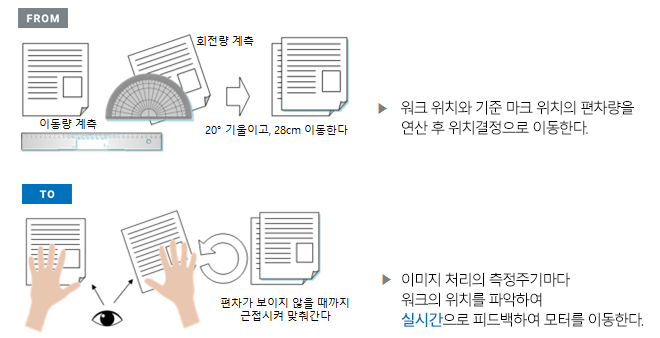
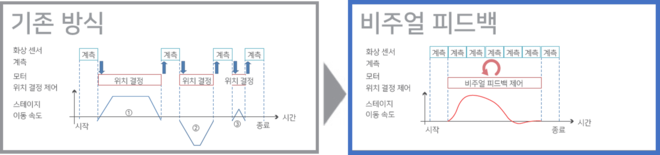
일반적으로 화상 처리를 이용한 위치 결정에는 카메라로 대상물의 위치를 계측하고 난 이후, 그 결과를 연산하여 모터를 구동합니다. 이러한 동작이 개별로 진행되기 때문에 화상 센서에는 위치 계측을 위한 고정밀 캘리브레이션이 요구되며, 모터에는 고정밀 구동이 요구되어 오고 있습니다.