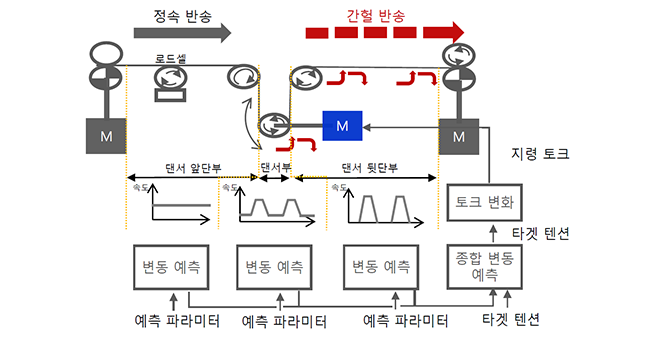
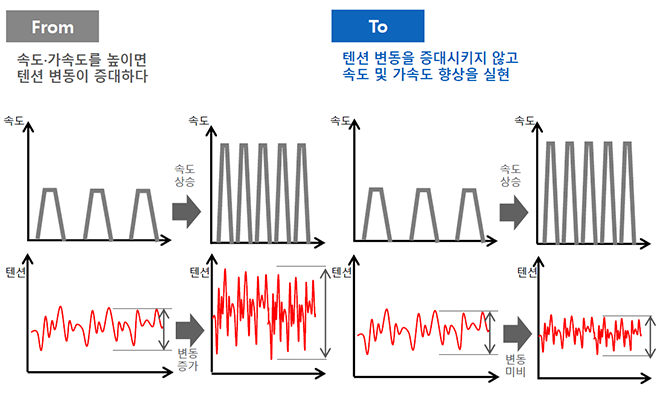
웹 재료의 얇아짐과 고속화로 인해 텐션 변동량이 커져 와인딩 불량, 불안정한 압력에 의한 주름, 늘어짐, 떨림 등이 발생합니다. 이러한 불안정한 텐션 변동을 억제 시키기 위한 댄서 기술로써, 간헐 동작 시 발생하는 텐션 변동을 억제하며, 고속화와 품질 유지를 양립할 수 있는 기술입니다.
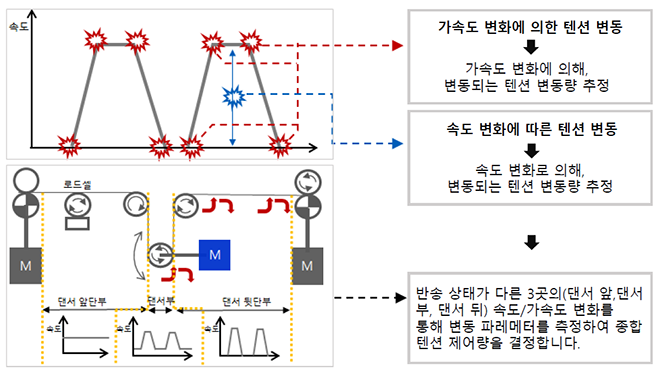
Tension FeedForward
텐션 제어 구간에서, 복수의 속도/가감속도 변화에 대응한 텐션 추정 기술
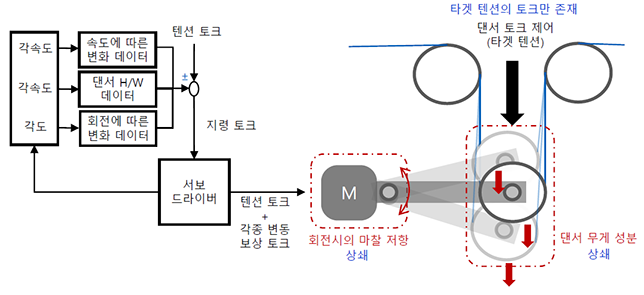
Zero Gravity
댄서의 상하 운동으로 인한 각종 변동을 추정 및 보정하여 웹에 텐션 성분의 힘만 부여합니다.