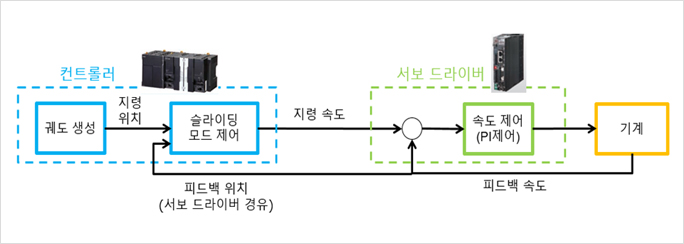
부하가 급격히 바뀌는 장비(Loll To Loll 설비, 스테커 크레인 등)에 기존 PID제어를 적용하게 되면 장비가 흔들리게 되는 헌팅이 발생하게 됩니다. 하지만, SMC는 Sysmac Library(Function Block)을 사용하여 장비 특성과 피드백된 데이터를 토대로 지령 값을 연산하기 때문에 흔들림 없이 부드러운 제어를 가능하게 합니다.
'고추종성'제어 - 추종성 향상
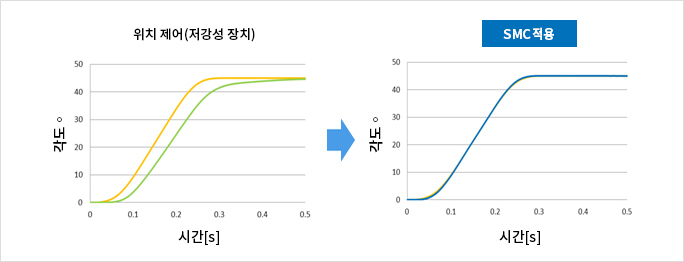
높은 게인 설정을 할 수 없던 장치도 높은 추종 제어 가능
낮은 관성장비에 위치제어와 슬라이딩 모드 제어 적용 후 위치와 속도 추종비교
벨트 구동 방식의 턴 테이블로 위치결정
정전시간 측정
'고견고성'의 확보 - 부하변동 대응 향상
부하변동 시에도 게인 재조정이 불필요
저부하와 고부하의 워크를 벨트 구동식 슬라이더에 올려 놓고 왕복 운전을 슬라이딩 모드로 제어하여 진동이 발생하지 않고 부드럽게 동작
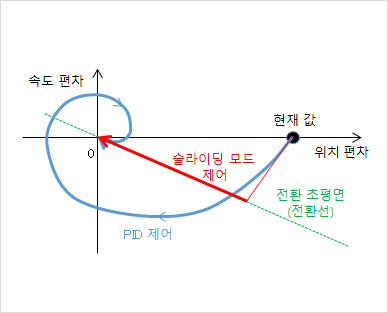
위치와 속도 편차를 부드럽게 제로화
전환 평면을 따라서 구동시킴으로써 목표 값에 지연 없이 빠르게 추종 가능
기계의 특성에 따른 전환 초평면(전환선)에 따르도록, 지령 속도를 제어 주기마다 연산 출력